
Robot quadrupède intelligent


Introduction
Mise à jour de l'algorithme : des mouvements plus agiles et plus réactifs
Développer une plus grande capacité à franchir les obstacles et à effectuer des mouvements de haute difficulté.
1. Peut sauter par-dessus des tranchées, sauter haut, effectuer des saltos avant et d'autres figures acrobatiques de haute difficulté.
2. Franchir des marches de 15 cm, soit presque la hauteur maximale atteignable par des robots quadrupèdes de même taille.
3. Assurer les saltos arrière, les torsions du corps, les sauts en torsion, les ondulations, le moonwalk, les roulades et les relevés, etc.
Évolution évolutive
Conception modulaire pour une expansion illimitée
La charge utile de 1,45 kg en marche augmente considérablement l'espace d'extension.
2. Fournir des interfaces de développement de capacités de perception avancées (SDK et API)
3. Grâce à sa structure modulaire ouverte et à ses interfaces, il prend en charge l'installation de modules RTK, de la 5G, de serveurs d'IA, de processeurs de périphérie et de divers capteurs.
4. Équipé d'un lidar et d'une caméra de profondeur, permettant un développement approfondi de capacités de perception avancées telles que la navigation autonome, l'arrêt et l'évitement automatiques d'obstacles, le positionnement visuel et la reconstruction de l'environnement.
Augmentation de 50 % du couple articulaire : une puissance accrue pour les mouvements
Les modules d'entraînement à couple élevé développés en interne présentent une densité de couple ultra-élevée, une large bande passante de réponse et un rendement de transmission inverse exceptionnel.
augmentation de 1,40 % de la charge utile maximale en marche
2. Autonomie de mouvement quasiment doublée, avec une durée de mouvement continu de 90 minutes et une autonomie de 5 km.
Triplement de la puissance de calcul des systèmes de contrôle industriels
Adoptez une centrale inertielle de qualité industrielle pour une amélioration globale de la stabilité et de la puissance de calcul.
1. Première introduction d'un système de contrôle en temps réel de qualité industrielle avec un noyau profondément optimisé
2. La puissance de calcul globale a presque triplé.
3. Avec une communication en temps réel rapide et une fréquence de contrôle allant jusqu'à 1 kHz
Système d'interaction homme-machine entièrement mis à niveau
1. Amélioration des performances de transmission d'images en temps réel dès la première visualisation grâce à une latence réduite
2. Ajout d'une interaction en langage léger, permettant aux utilisateurs d'obtenir en temps réel divers états du robot quadrupède.
3. Des mouvements assistés par la perception plus sûrs et plus diversifiés
4. Prise en charge de l'arrêt, de la reconnaissance et du suivi des obstacles avant et arrière, de l'évitement des obstacles avant, de la navigation autonome et d'autres fonctions
Paramètres techniques
| 1. Plateforme matérielle | |
| Taille debout | Longueur 610 mm ± 10 mm, Largeur 370 mm ± 10 mm, Hauteur 445 mm ± 10 mm |
| Taille couchée | Longueur 680 mm ± 10 mm, Largeur 370 mm ± 10 mm, Hauteur 175 mm ± 10 mm |
| Poids total (avec batterie) | environ 12,2 kg |
| Autonomie à vide | 1,5 h à 2 h, portée : 4 km |
| Le robot utilise un algorithme de contrôle de force complet pour son équilibre. Il peut effectuer une détection de force 3D à 360° sans vision périphérique au niveau du pied, sans capteurs de pression plantaire, ce qui réduit l'usure des pieds et les coûts de maintenance. | |
| Matériel | Cuisses : alliage d'aluminium ; tiges : plastique composite haute résistance ; s Semelles : caoutchouc absorbant les chocs, antidérapant et résistant à l'usure. |
| batterie | Équipé d'une batterie au lithium enfichable ; capacité de la batterie ≥ 4400 mAh, énergie nominale ≥ 126,7 Wh ; temps de charge : 40 min à 1 h. |
| DOF | Degrés de liberté totaux (DOF) : 12 ; DOF par jambe : 3. |
| module commun | Adopte un module de joint intégré avec un diamètre extérieur ≤76 mm ; composé d'un moteur à haute densité de couple, d'un réducteur de haute précision, d'un codeur absolu et d'un capteur de température. |
| Sortie d'alimentation intégrée (5V/12V/24V) et interfaces de communication (Ethernet/WiFi) pour un développement secondaire pratique. | |
| Modes de protection | Arrêt d'urgence progressif, alarme de basse tension, alarme de surchauffe. |
| 2. Contrôle de mouvement |
| Adopte un capteur inertiel de qualité industrielle ; résolution de l'accéléromètre jusqu'à 0,09 mg, résolution du gyroscope jusqu'à 0,004°/s. |
| Fréquence de contrôle du bus de communication : 1 kHz. |
| Assure une marche stable et des allures rapides |
| Permet de monter des escaliers, des pentes et de ramper ; pente maximale en montée : 40° (selon le matériau de la pente) ; hauteur maximale des marches continues : 15 cm ; adaptable aux routes en béton, aux routes en gravier, etc. |
| Charge utile en marche continue : jusqu'à 4,5 kg. |
| Permet le déplacement sur place, la translation avant/arrière/gauche/droite et la rotation gauche/droite. |
| Permet de réaliser diverses démonstrations : saut en avant, saut en rotation, moonwalk, etc. ; distance maximale de saut en avant : 50 cm. |
| Favorise le développement d'autres allures et mouvements de haute performance |
| 3. Perception intelligente |
| Caméra grand angle*1 : champ de vision horizontal 130° ; 1920×1080 à 30 images/s ; antireflet, sans distorsion ; prend en charge le développement d’algorithmes de reconnaissance et de suivi du corps humain. |
| Radars à ultrasons*2 : prise en charge du développement d’algorithmes de détection de distance et d’arrêt d’obstacles. |
| Doté d'un système d'évitement d'obstacles avant et arrière. |
| 4. Développement secondaire |
| Fournit un modèle de robot, un kit de développement logiciel (SDK) et une API de mouvement, une démonstration de développement de mouvement et des manuels de développement secondaires détaillés. |
| Fournit des interfaces logicielles de développement de la perception avec des manuels d'utilisation et de développement détaillés ; système ROS intégré pour un développement secondaire rapide. |
Présentation de l'entreprise
En 2008, la société Beijing Hewei Yongtai Technology Co., LTD a été créée à Pékin. Elle se concentre sur le développement et l'exploitation d'équipements de sécurité spéciaux, principalement destinés aux services de sécurité publique, à la police armée, à l'armée, aux douanes et autres départements de sécurité nationale.
En 2010, la société Jiangsu Hewei Police Equipment Manufacturing Co., LTD a été créée à Guannan. Couvrant une superficie de 9000 mètres carrés d'ateliers et de bureaux, elle vise à construire une base de recherche et de développement d'équipements de sécurité spéciaux de premier ordre en Chine.
En 2015, un centre de recherche et de développement militaro-policier a été créé à Shenzhen. Axé sur le développement d'équipements de sécurité spéciaux, il a mis au point plus de 200 types d'équipements de sécurité professionnels.






Expositions à l'étranger


Certificats
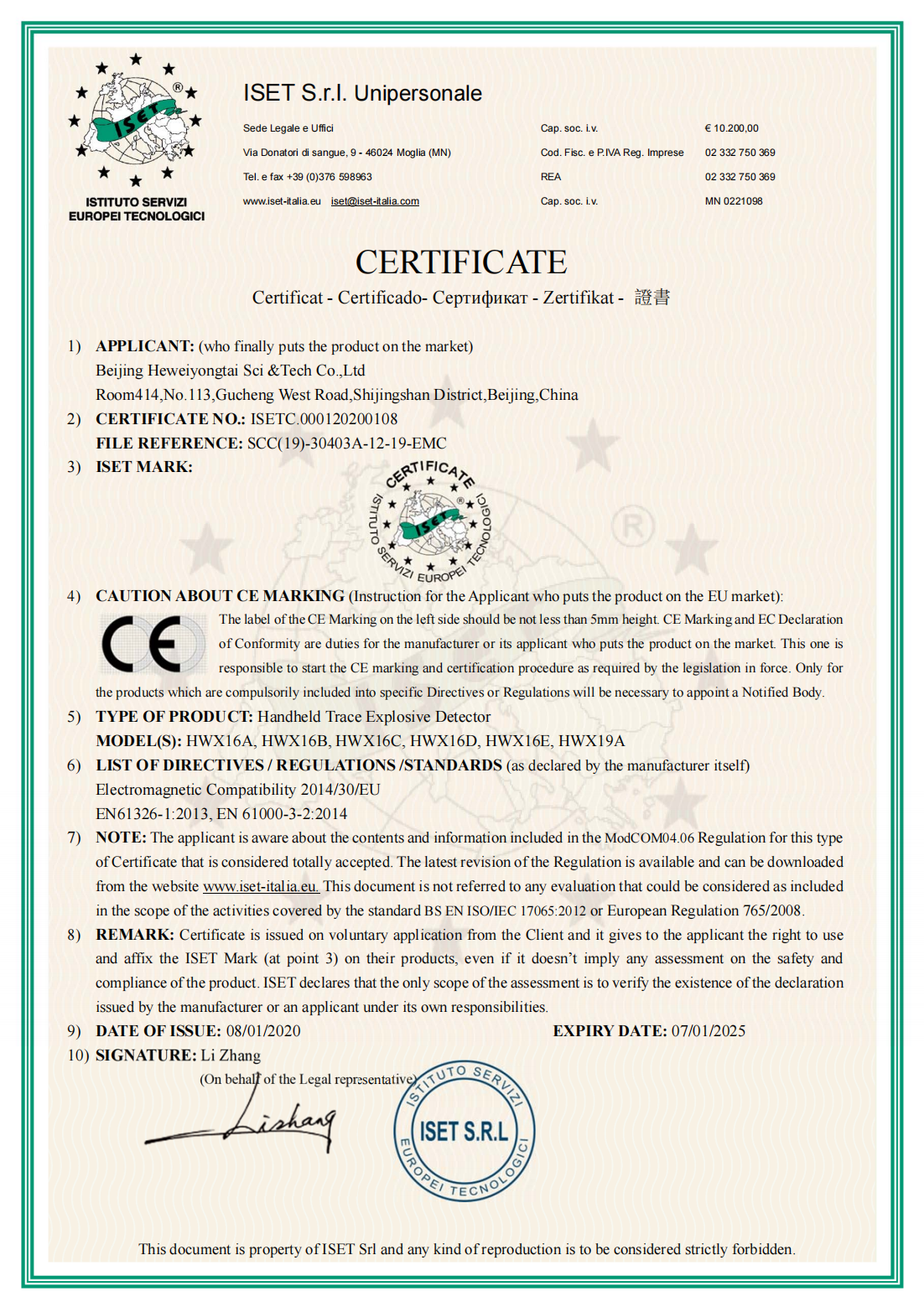

Beijing Heweiyongtai Sci & Tech Co., Ltd. est un fournisseur de premier plan de solutions de déminage et de sécurité. Notre personnel est composé de professionnels qualifiés, tant techniques que managériaux, pour vous garantir un service irréprochable.
Tous nos produits sont accompagnés de rapports de tests et de certificats d'autorisation de niveau professionnel national. Vous pouvez donc commander nos produits en toute confiance.
Un contrôle qualité rigoureux pour garantir une longue durée de vie du produit et la sécurité des opérateurs.
Avec plus de 10 ans d'expérience dans le secteur des équipements de déminage, de lutte contre le terrorisme, de renseignement, etc.
Nous avons servi avec professionnalisme des clients dans plus de 60 pays à travers le monde.
Pas de quantité minimale de commande pour la plupart des articles, livraison rapide pour les articles personnalisés.




